ESP32-C3 vs ESP32-S3 vs ESP32-C6: How to Choose for Real Firmware Projects
Many teams still pick an ESP32 part by "newest silicon," clock speed, or BOM delta. Those numbers matter, but once you reach board design, driver bring-up, protocol stacks, and production maintenance, success usually depends on whether the SoC matches your system boundary, not a single headline spec.
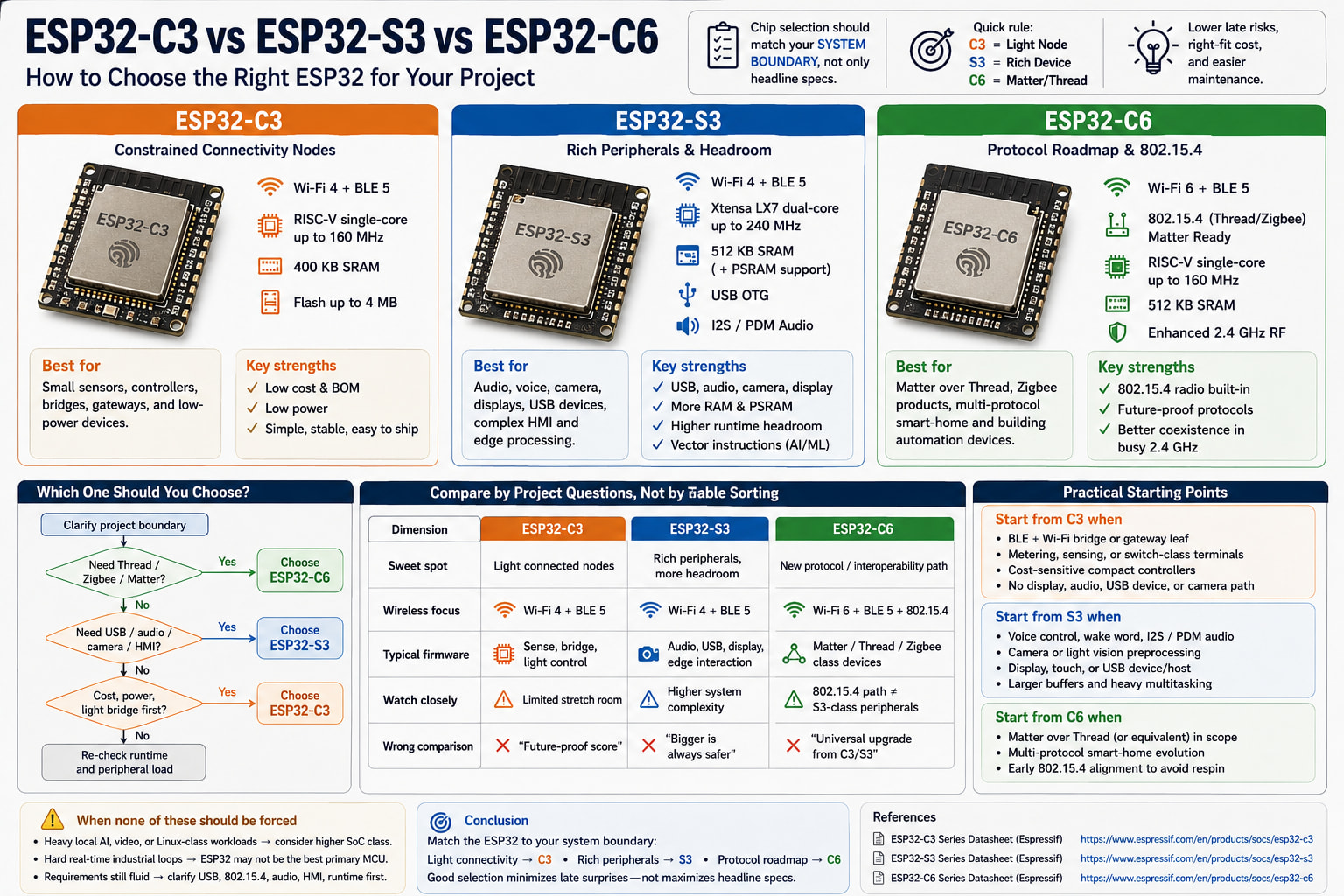
Bottom line: ESP32-C3 fits cost‑sensitive, well‑scoped Wi‑Fi + BLE connectivity nodes. ESP32-S3 fits USB, audio, camera, display, and higher runtime headroom on the device. ESP32-C6 fits products that commit to Matter / Thread / Zigbee and a long‑term 802.15.4 path. If the hard part is peripherals and firmware complexity, start with S3; if the hard part is protocol evolution and interoperability, start with C6; if the product stays a small connected node, C3 is often the steadiest and cheapest.
What "chip selection" means here: not who wins a spec sheet, but which part makes it easier to satisfy your peripherals, protocols, power budget, software complexity, and maintenance constraints.
Quick rule: Lightweight sensor, bridge, or small controller → C3 first. USB, screen, audio, camera, or heavy local processing → S3 first. Day‑one 802.15.4 / Thread / Zigbee / Matter → C6 first.
Why projects fail before the SoC "runs out of MHz"
Teams often treat selection as a price and parameter matrix. In development, pain usually comes from mismatched boundaries:
- Needing USB debug, factory programming, or bridging, but the chosen part is a poor fit.
- Underestimating audio, voice front‑end, or UI memory and peripheral load.
- Shipping Wi‑Fi + BLE today, then needing Matter / Thread six months later—forcing a board and stack redo.
- Building a simple bridge node but oversizing silicon, raising BOM, power, and firmware surface for little gain.
Chip selection should cover the hardest part of your system, not "theoretically strongest."
The four boundaries to settle before comparing parts
Lock these before arguing about cores:
- Wireless: Wi‑Fi + BLE only, or also 802.15.4 (Thread / Zigbee) and Matter trajectory.
- Peripherals: USB, audio, camera, LCD, touch, and human‑machine interaction.
- Runtime: Tasks, logging, buffers, stacks, and any local ML or media preprocessing.
- Product roadmap: One‑shot gadget vs evolving platform (protocols and form factors).
Without this, debates become "wrong premise vs wrong premise."
ESP32-C3: constrained connectivity nodes
C3 shines when the product is a small, clear connected node: networked sensors, compact controllers, serial gateways, BLE/Wi‑Fi bridges.
Typical fit:
- 2.4 GHz Wi‑Fi + BLE is enough.
- No strong USB, camera, or audio path.
- Priorities: cost, power, and stable mass production.
- Firmware centers on connectivity, sampling, bridging, and simple control.
Value: keep the system light. If you do not need richer HMI or local processing, a larger part often increases BOM and software scope without proportional benefit.
ESP32-S3: rich peripherals and headroom
S3 is the practical default when the device is interaction‑ or media‑heavy: voice terminals, USB gadgets, displays, camera pipelines, and edge vision front ends—workloads that quickly stress multitasking and buffers.
Typical fit:
- USB OTG or wired peripheral expansion.
- I2S / PDM audio and voice front ends.
- Camera, LCD, touch, or richer HMI.
- More SRAM / PSRAM for stable multitasking.
- Heavier on‑device processing (including use of vector instructions where applicable).
If the stack already looks like "display + audio + Wi‑Fi + OTA + preprocessing," S3 is usually more realistic than squeezing C3.
ESP32-C6: protocol roadmap and 802.15.4
C6 is not "newer C3" alone—it pairs Wi‑Fi 6 with 802.15.4 for Thread, Zigbee, Matter, and similar multi‑radio home / building directions.
Typical fit:
- Product commits to Thread / Zigbee / Matter (or clear 802.15.4 evolution).
- Interoperability and protocol roadmap matter more than "Wi‑Fi only today."
- You want RF behavior suited to busy 2.4 GHz environments (within the limits of your design).
- You prefer to align the board and stack early rather than retrofit 802.15.4 later.
C6 is not an automatic substitute for S3. If the pain is USB, audio, camera, or dense HMI, S3 can still be the better anchor SoC.
Compare by project questions, not by table sorting
flowchart TD
A["Clarify project boundary"] --> B{"Need Thread / Zigbee / Matter?"}
B -->|Yes| C["Prioritize ESP32-C6"]
B -->|No| D{"Need USB / audio / camera / HMI?"}
D -->|Yes| E["Prioritize ESP32-S3"]
D -->|No| F{"Cost, power, light bridge first?"}
F -->|Yes| G["Prioritize ESP32-C3"]
F -->|No| H["Re-check runtime and peripheral load"]
System cost, not "performance"
| Dimension | ESP32-C3 | ESP32-S3 | ESP32-C6 |
|---|---|---|---|
| Sweet spot | Light connected nodes | Rich peripherals, more headroom | New protocol / interoperability path |
| Wireless focus | Wi‑Fi + BLE | Wi‑Fi + BLE | Wi‑Fi 6 + BLE + 802.15.4 |
| Typical firmware | Sense, bridge, light control | Audio, USB, display, edge interaction | Matter / Thread / Zigbee class devices |
| Watch closely | Limited stretch room | Higher system complexity | 802.15.4 path ≠ S3‑class peripherals |
| Wrong comparison | "Future‑proof score" | "Bigger is always safer" | "Universal upgrade from C3/S3" |
If you compare on the wrong axis, the hardest risks surface late in firmware bring‑up.
Why C6 is not a universal upgrade
Strong 802.15.4 and Matter alignment do not mean every Wi‑Fi sensor or bridge should jump to C6. If you have no 802.15.4 requirement and no clear smart‑home interoperability roadmap—e.g. simple acquisition, BLE/Wi‑Fi bridge, serial tunnel, light Modbus / Home Assistant style nodes—C6 may add protocol surface you will not use for a long time.
Why S3 is not "always safer"
S3 is appropriate for complex devices, but oversizing hurts too:
- Higher BOM and often harder power budgets.
- Temptation to over‑feature firmware "because you can."
If the device is only a low‑power sensor, single‑protocol node, downstream gateway client, or light actuator, S3 may be unnecessary cost and complexity.
Practical starting points
Start from C3 when
- BLE + Wi‑Fi bridge or gateway leaf.
- Metering, sensing, or switch‑class terminals.
- Cost‑sensitive compact controllers.
- No display, audio, USB device mode, or camera path.
Start from S3 when
- Voice control, wake word, I2S / PDM audio paths.
- Camera or light vision preprocessing on device.
- Display, touch, or USB device/host features.
- Larger buffers and more aggressive multitasking.
Start from C6 when
- Matter over Thread (or equivalent) is in scope.
- You plan multi‑protocol smart‑home class evolution.
- Early 802.15.4 alignment beats a later respin.
When none of these should be forced
- Heavy local AI, video, or Linux‑class workloads: consider stepping up SoC class entirely.
- Hard real‑time industrial loops: ESP32 may not be the best primary controller; treat as gateway or comms companion unless requirements are modest.
- Requirements still fluid: clarify USB, 802.15.4, audio, HMI, and runtime before locking a part.
Conclusion
The useful comparison is which boundary each SoC covers best:
- Is 802.15.4 / Matter already in scope?
- Do USB, audio, camera, or HMI push you toward a "full device" architecture?
- Only then optimize cost, power, and software margin.
For light connectivity, C3 is often the steadiest. For rich peripherals and firmware depth, S3 is usually the right stress test. For protocol and interoperability roadmap, C6 is the forward‑looking default. Good selection minimizes late surprises—not maximizes headline specs.