Wireless Stepper Motor Controller with ESP32 and TMC2240
Project Overview and Highlights
This project presents a compact, intelligent wireless stepper motor controller, enabling users to remotely control the motor via a web browser. The main features include:
- Wireless control: Real-time position, speed, and direction adjustment through a web interface.
- High precision: Supports up to 1/256 microstepping, with closed-loop feedback using the AS5600 magnetic encoder.
- Smart power management: USB-C Power Delivery (PD) with automatic voltage negotiation (5V~20V).
- Real-time monitoring: Displays motor position, temperature, current, and more.
- Visual feedback: RGB LED indicates system status and motor activity.

Main Components
- ESP32-S3-WROOM-1: Dual-core microcontroller with Wi-Fi/Bluetooth, provides web server and SPI/I²C communication.
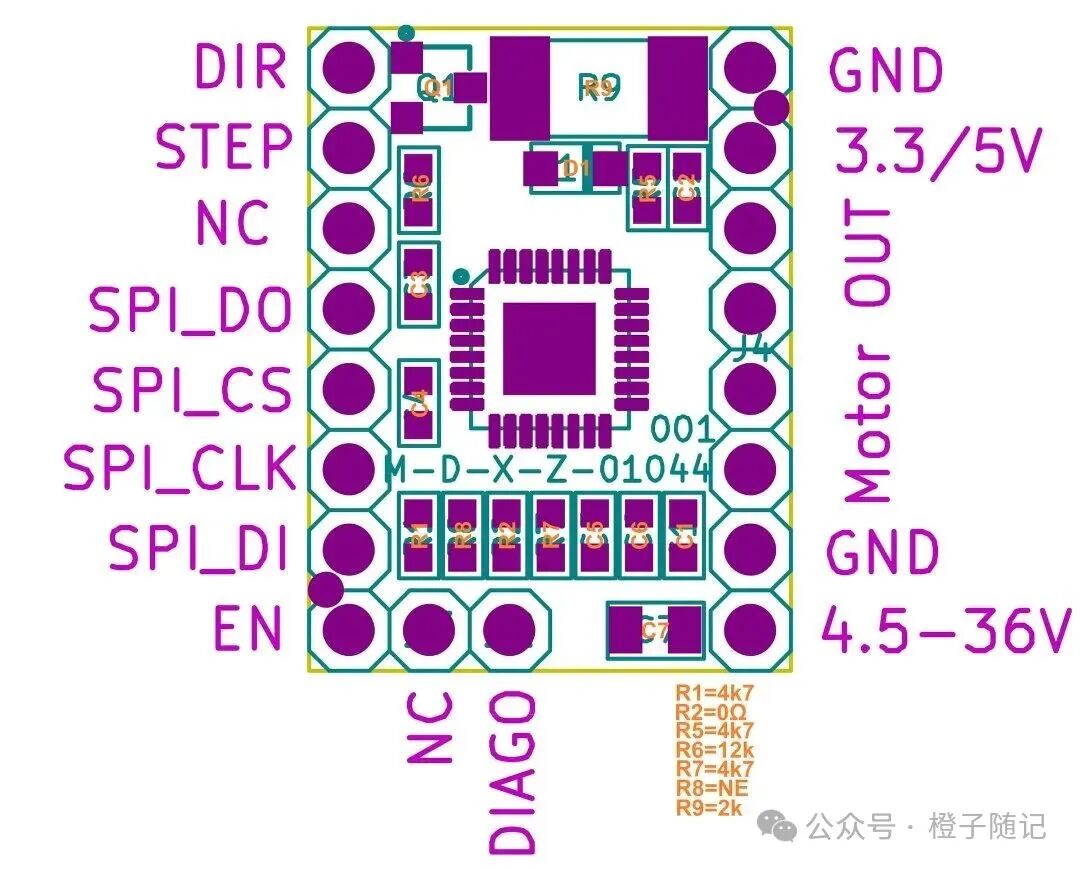
- TMC2240ATJ+T (Analog Devices): High-precision stepper driver, supports 2A current, ultra-quiet operation, SPI configuration, and diagnostics.
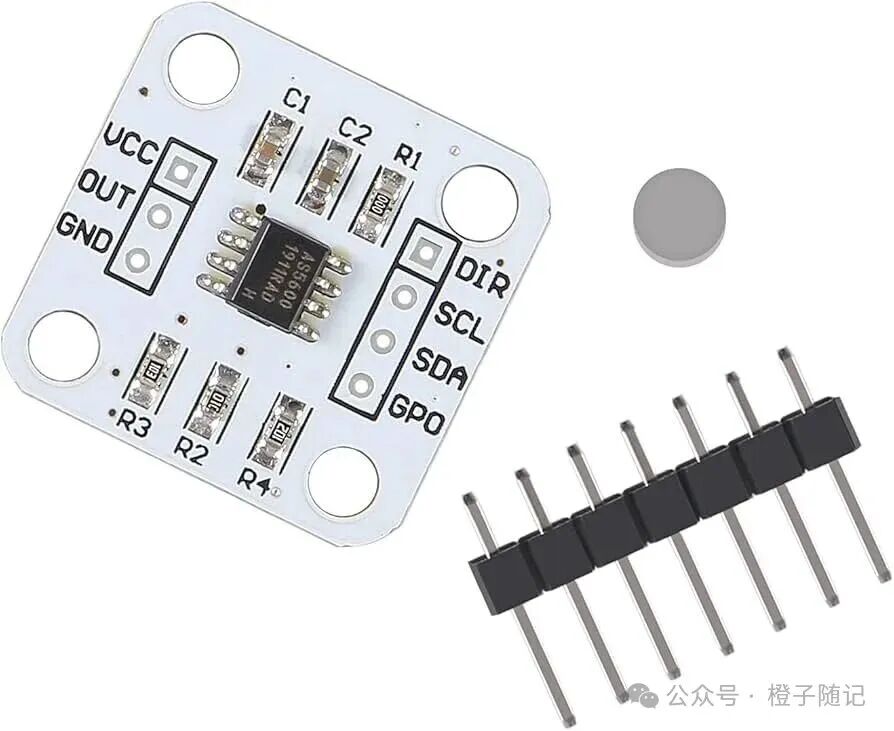
- AS5600-ASOM: 12-bit non-contact magnetic rotary position sensor for precise angle feedback (closed-loop control).
- FUSB302BMPX (onsemi): USB-C PD controller for voltage negotiation.
- ADPL44002AUJZ (or other LDO): Stable 3.3V logic power supply.
- Others: RGB LED, buttons, TVS protection diodes, MOSFETs, etc.
Hardware Design and PCB
The custom PCB is designed with KiCad, measuring only 42.3mm × 42.3mm, perfectly matching the NEMA17 stepper motor and can be mounted directly on the motor's back.
- Power: USB-C via FUSB302 negotiates voltage, LDO steps down to 3.3V.
- Control: ESP32 configures TMC2240 via SPI, drives the motor with STEP/DIR pulses; reads AS5600 position and PD status via I²C.
- Protection: TVS diodes for surge protection, current sense resistors for load monitoring.
Assembly and Enclosure
- Solder SMD components (recommended stencil + reflow, or manual soldering).
- Laser-cut acrylic/materials for a simple enclosure (with spacers for encoder height).
- Attach a small magnet (about 3mm diameter) to the motor shaft, aligned with the AS5600.
- The final assembly is compact, with the driver IC exposed for better heat dissipation.

Software and Firmware
- Development environment: Arduino IDE or PlatformIO.
- Key libraries: WiFi, WebServer, AS5600, PD_UFP, ArduinoJson, SPI, etc.
- Features:
- Wi-Fi AP/Station mode, hosts web pages.
- Non-blocking operation: web server remains responsive during motor movement.
- Supports microstep configuration, speed control, position feedback, emergency stop, etc.
- Web interface: Mobile-friendly, allows setting voltage, speed, steps, target angle, and displays real-time status.

Application Scenarios
- Robotic arm precise movement
- CNC/laser engraving positioning
- Smart home curtain/valve control
- Rapid prototyping and educational projects
Summary
This project demonstrates the potential of ESP32 combined with a high-end driver, leveraging wireless and closed-loop feedback to greatly enhance the convenience and precision of traditional stepper control.
Project repository: https://github.com/Circuit-Digest/Wireless-Stepper-Motor-Controller